Projects
- A learned feature detector and descriptor for bursts of images
- Noise-tolerant features outperform state of the art in low light
- Enables 3D reconstruction from drone imagery in millilux conditions
- RectConv adapts existing pretrained CNNs to work with fisheye images
- Requires no additional data or training
- Operates directly on the native fisheye image as captured from the camera
- Works with multiple network architectures and tasks
- 3D change detection with Gaussian splatting.
- Label-free and robust to viewpoint changes between trajectories.
- New dataset of ten challenging scenes with structural and surface changes.
- Lightweight pipeline for event and RGB camera-based automated satellite docking
- We introduce a photometrically accurate physical orbital simulator
- We show advantages of mixing data-driven and geometric models
- We validate event cameras enable docking in a broad range of practical conditions
- Find the preprint here, more details coming soon at
the project page.
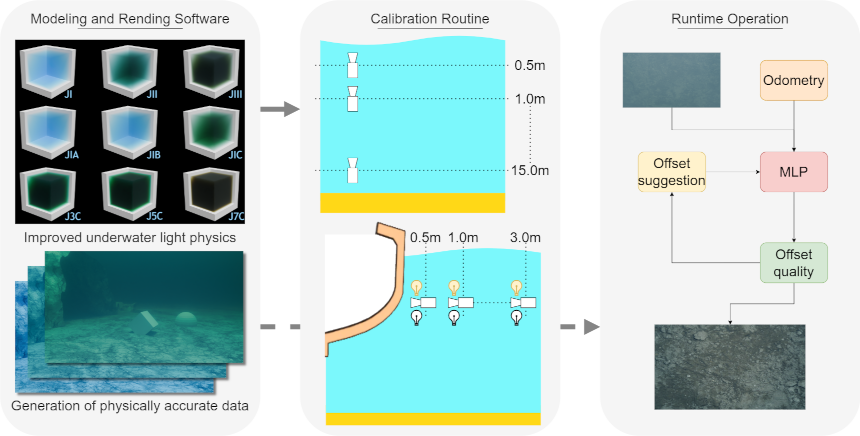
- We increase the autonomy capabilities of underwater robotic platforms.
- We improve simulation of underwater imagery within the Blender modeling software, including more accurate light behaviour in water, and models of the oceans.
- We introduce a method for in-situ water column property estimation using a monocular camera and adjustable illumination.
- We design a framework providing online guidance suggestions to maintain high-quality data collection and maximise visual coverage in a broad range of water conditions.
- Surface light field inspired regularisation to improve geometric fidelity of NeRF-based representations
- We propose a second sampling of the representation to regularise local appearance and geometry at surfaces in the scene
- Applicable to future NeRF based models leveraging reflection parameterisation
- An effective light field segmentation method
- Combines epipolar constraints with the rich semantics learned by the pretrained SAM 2 foundation model for cross-view mask matching
- Produces results of the same quality as the Segment Anything 2 (SAM 2) video tracking baseline, while being 7 times faster
- Can be inferenced in real-time for autonomous driving problems such as object pose tracking
- An end-to-end camera design method that co-designs cameras with perception tasks
- We combine derivative-free and gradient-based optimizers and support continuous, discrete, and categorical parameters
- A camera simulation including virtual environments and a physics-based noise model
- Key step in simplifying the process of designing cameras for robots
- Robotic vision without capturing images or allowing image reconstruction
- We propose guidelines and demonstrate localisation in simulation
- Call to action for advancing inherently private vision systems
- Try the reconstruction challenge!
- We introduce burst feature finder, a 2D + time feature detector and descriptor for 3D reconstruction
- Finding features with well defined scale and apparent motion within a burst of frames
- Approximate apparent feature motion under typical robotic platform dynamics, enabling critical refinements on hand-held burst imaging
- More accurate camera pose estimates, matches and 3D points in low-SNR scenes
- Automatically interpreting new cameras by jointly learning novel view sythesis, odometry, and a camera model
- A hypernetwork allows training with a wealth of existing cameras and datasets
- A semi-supervised light field network adapts to newly introduced cameras
- This work is a key step to automated integration of emerging camera technologies
- We adapt burst imaging for 3D reconstruction in low light
- Combining burst locally and feature-based methods over broad motions benefits from the strengths of each
- Allows 3D reconstructions where conventional imaging fails
- More accurate camera trajectory estimates, 3D reconstructions, and lower overall computational burden
- Jointly learning to super-resolve and label improves performance at both tasks
- Adversarial training enforces perceptual realism
- A feature loss forces semantic accuracy
- Demonstration on aerial imagery for remote sensing
- We describe the hyperbolic view dependency in Time of Flight Fields
- Our all-in-focus filter improves 3D fidelity and robustness to noise and saturation
- We release a dataset of thirteen 15 x 15 time of flight field images
- Fast classification of visually similar objects using multiplexed illumination
- Using light stage capture and rendering to drive optimization of multiplexing codes
- Outperforms naive and conventional multiplexing patterns in accuracy and speed
- Unsupervised learning of odometry and depth from sparse 4D light fields
- Encoding sparse LFs for consumption by 2D CNNs for odometry and shape estimation
- Toward unsupervised interpretation of general LF cameras and new imaging devices
- A new kind of feature that exists in the patterns of light refracted through objects
- Allows 3D reconstructions where SIFT / LiFF fail
- More accurate camera trajectory estimates, 3D reconstructions in complex refractive scenes
- SIFT-like features for light fields
- Robust to occlusions, noise, and high-order light transport effects
- Each feature has a well-defined depth / light field slope
- 138° 72 Mpix LF panoramas through a single, spherical lens
- Spherical parameterization compatible with planar light fields
- World's first single-lens wide-FOV LF camera
- Generalization of Richardson-Lucy deblurring to moving light field cameras
- 6-DOF camera motion in arbitrary 3D scenes
- Deblurring of nonuniform apparent motion without depth estimation
- Novel parallax-preserving light field regularization
Image-based visual servoing with light field cameras
- Exploits depth information in the light field without explicit depth estimation
- Derivation of light field image Jacobians
- Demonstration on robotic arm using a MirrorCam light field camera
- Outperforms monocular and stereo methods for narrow-FOV and occluded scenes
- D. Tsai, D. G. Dansereau, T. Peynot, and P. Corke, “Image-based visual servoing with light field cameras,” IEEE Robotics and Automation Letters (RA-L), vol. 2, no. 2, Apr. 2017. Available here.
Spinning Omnidirectional Stereo Camera
- Live-Streaming 3D Virtual Reality Video
- Project page at Stanford, Example Videos, SIGGRAPH Asia slides (pdf w/embedded video)
- R. Konrad*, D. G. Dansereau*, A. Masood, and G. Wetzstein, “SpinVR: Towards live-streaming 3D virtual reality video,” ACM Transactions on Graphics (TOG), SIGGRAPH ASIA, vol. 36, no. 6, Nov. 2017. Available here.
Lunaroo
- A hopping lunar explorer for telemetry and mapping
- Project Page at juxi.net
- J. Leitner, W. Chamberlain, D. G. Dansereau, M. Dunbabin, M. Eich, T. Peynot, J. Roberts, R. Russell, and N. Sünderhauf, “LunaRoo: Designing a hopping lunar science payload,” in IEEE Aerospace Conference, 2016. Available here.
- T. Hojnik, R. Lee, D. G. Dansereau, and J. Leitner, “Designing a robotic hopping cube for lunar exploration,” in Australasian Conference on Robotics and Automation (ACRA), 2016. Available here.
Mirrored light field video camera adapter
- 3D printed base + laser-cut acrylic mirrors
- Creates a virtual array of cameras that measures a light field
- Optimization scheme finds best mirror array for a specific application
- D. Tsai, D. G. Dansereau, S. Martin, and P. Corke, “Mirrored light field video camera adapter,” Queensland University of Technology, Dec. 2016. Available here.
- Robot interaction as part of the imaging process
- Visual material analysis: discriminating objects based on how they behave
- Motion magnification for stiff and fragile objects
- Closed-form change detection from moving cameras
- Model-free handling of nonuniform apparent motion from 3D scenes
- Handles failure modes from competing single-camera methods
- Approach generalizes to simplifying other moving-camera problems
Light Field Depth-Velocity Filtering
- A 5D light field + time filter that selects for depth and velocity
- C. U. S. Edussooriya, D. G. Dansereau, L. T. Bruton, and P. Agathoklis, “Five-dimensional (5-D) depth-velocity filtering for enhancing moving objects in light field videos,” IEEE Transactions on Signal Processing (TSP), vol. 63, no. 8, pp. 2151–2163, April 2015. Available here.
- A linear filter that focuses on a volume instead of a plane
- Enhanced imaging in low light and through murky water and particulate
- Derivation of the hypercone / hyperfan as the fundamental shape of the light field in the frequency domain
Exploiting parallax in panoramic capture to construct light fields
- We show that parallax, usually considered a nuisance, can be exploited to build light fields
- We turn an Ocular Robotics camera pointing system into an adaptive light field camera
- We demonstrate light field capture, refocusing and low-light image enhancement
- Best paper award, ACRA 2014
- D. G. Dansereau, D. Wood, S. Montabone, and S. B. Williams, “Exploiting parallax in panoramic capture to construct light fields,” in Australasian Conference on Robotics and Automation (ACRA), 2014. Available here.
Plenoptic flow for closed-form visual odometry
- Generalization of 2D Lucas–Kanade optical flow to 4D light fields
- Links camera motion and apparent motion via first-order light field derivatives
- Solves for 6-degree-of-freedom camera motion in 3D scenes, without explicit depth models
- D. G. Dansereau, I. Mahon, O. Pizarro, and S. B. Williams, “Plenoptic flow: Closed-form visual odometry for light field cameras,” in Intelligent Robots and Systems (IROS), 2011, pp. 4455–4462. Available here.
- see also Ch.5 of D. G. Dansereau, “Plenoptic signal processing for robust vision in field robotics,” PhD thesis, Australian Centre for Field Robotics, School of Aerospace, Mechanical; Mechatronic Engineering, The University of Sydney, 2014. Available here.
Gradient-based depth estimation from light fields
- Depth from local gradients
- Simple ratio of differences, easily parallelized
- D. G. Dansereau and L. T. Bruton, “Gradient-based depth estimation from 4D light fields,” in Intl. Symposium on Circuits and Systems (ISCAS), 2004, vol. 3, pp. 549–552. Available here.