Welcome to the Robotic Imaging Lab at the University of Sydney, lead by Dr Don Dansereau. Our work explores how new imaging technologies can help robots see and do.
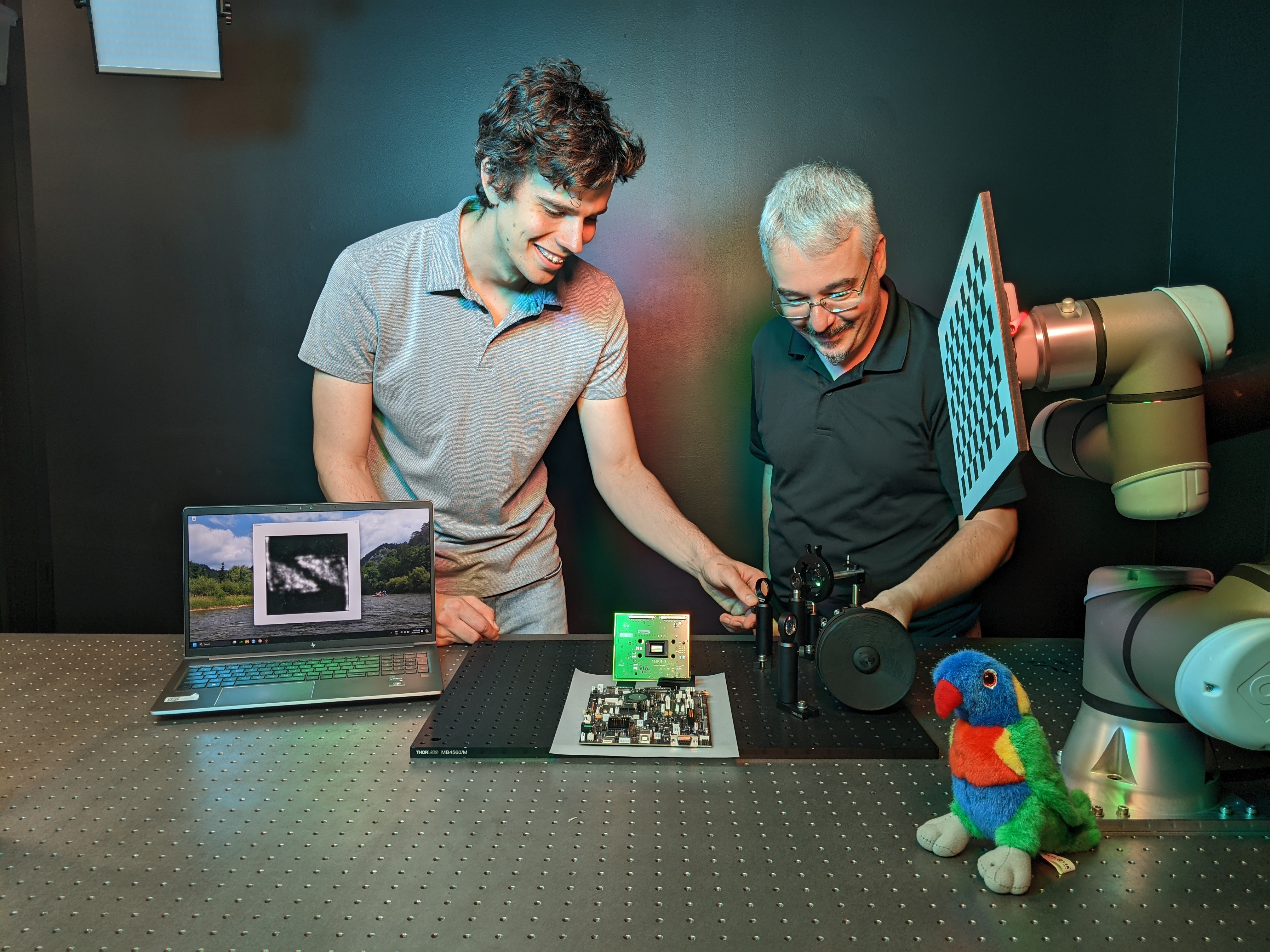
Check out our new video introducing some of the team:
News
This work is a collaboration with QUT Centre for Robotics and Abyss Solutions, part of the ARIAM Hub.

This work is a collaboration with UTS Robotics Institute and ANT61.

At the WACI Workshop Nikolai Goncharov is presenting LFSAM: Segment Anything in Light Fields for Real-Time Applications via Constrained Prompting. We bring the SAM 2 foundation model into the light field domain without retraining. Our approach is faster than naive subaperture segmentation and leverages the light field structure for view consistency.
Check the project page links above for papers and code!
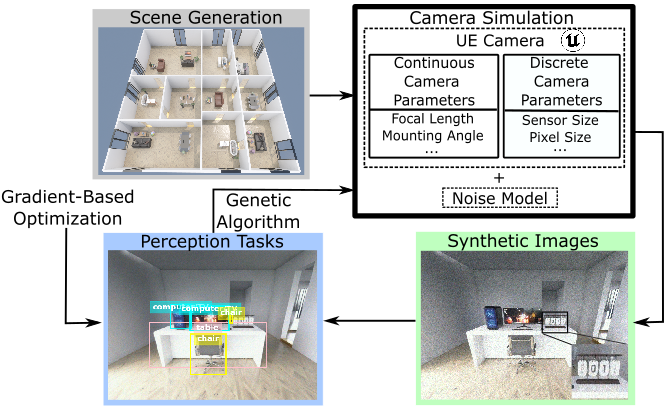

We received an NVIDIA Academic Grant for our project "Physics-Based Simulation for Robotic Vision in Extreme Environments". The GPUs they're sending will help us leverage NVIDIA's cutting-edge ray-tracing and deep learning capabilities.
Congrats to PhD candidate Bina Rajan who received first prize for her submission to the SafetyCulture Spot Competition along with Michael Somerfield. Take a moment to watch their fantastic video! The Spot Mini they've been awarded will come in handy in our ARIAM Hub infrastructure inspection and management research.
Our student Jack Naylor has been awarded a Fullbright Future Scholarship! Jack will be visiting my colleague and friend Matthew O'Toole and his group at the Carnegie Mellon University Robotics Institute developing exciting new ideas using radiance fields for multi-modal sensing.
We have received an ARC Discovery Grant on "Introspection for Resilient Robotic Perception in Challenging Environments", with Stefan Williams at USyd and Thierry Peynot at QCR. This 3-year program will advance how robots reason about and adapt to their own perceptual limitations, enhancing resilience in challenging environments such as murky water and extreme weather where state-of-the-art approaches fail.
Finally, the group have received a bit of an early Christmas present in the form a new Agilex Scout Mini robot. It's a pretty capable and nimble platform, and we look forward to making it see and interact with the world in new ways, from photons to actions!
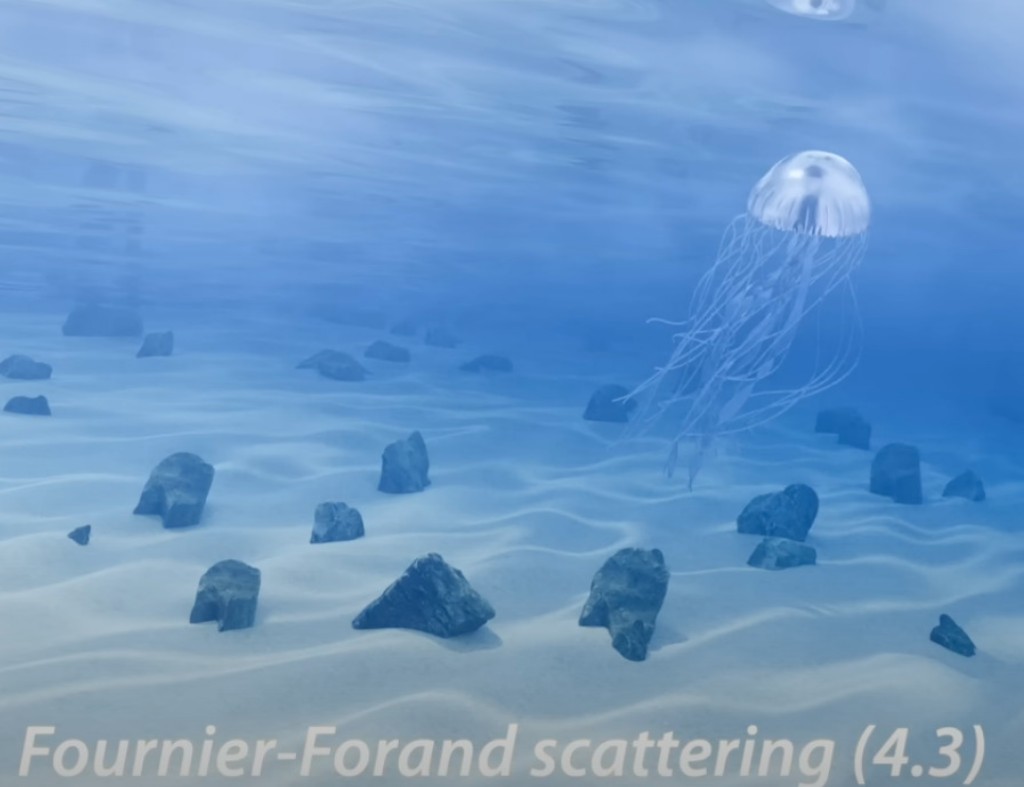
Alexandre Cardaillac lead this work introducing new physics-based volume scattering phase functions into Blender 4.3. This was driven by our need to accurately simulate imagery from underwater robots. As you can see in the video, it has utility in all sorts of scattering environments including fog, clouds, and even interstellar dust! We hope it's useful in a wide range of scientific as well as artistic applications!
This work was conducted as part of the ARIAM Research Hub in collaboration with industry partner Advanced Navigation.